Edge-Correlated Growing Hypergraphs
Conference on Network Science, Québec City | June 19th, 2024
Hi everyone!
I’m Phil Chodrow. I’m an applied mathematician by training. These days my interests include:
- Network models + algorithms
- Dynamics on networks
- Data science for social justice
- Undergraduate pedagogy
Hi everyone!
I’m a new(ish) assistant professor of computer science at Middlebury College in Middlebury, Vermont.

Middlebury is a small primarily-undergraduate institution (PUI) in Vermont, USA.
Hypergraphs
A hypergraph is a generalization of a graph in which edges may contain an arbitrary number of nodes.
XGI let’s gooooo
What’s special about hypergraphs?
What can we observe or learn in hypergraph structure that we couldn’t observe or learn in a dyadic graph?
One answer for today: 2-edge motifs.
XGI let’s gooooo
Motifs in graphs
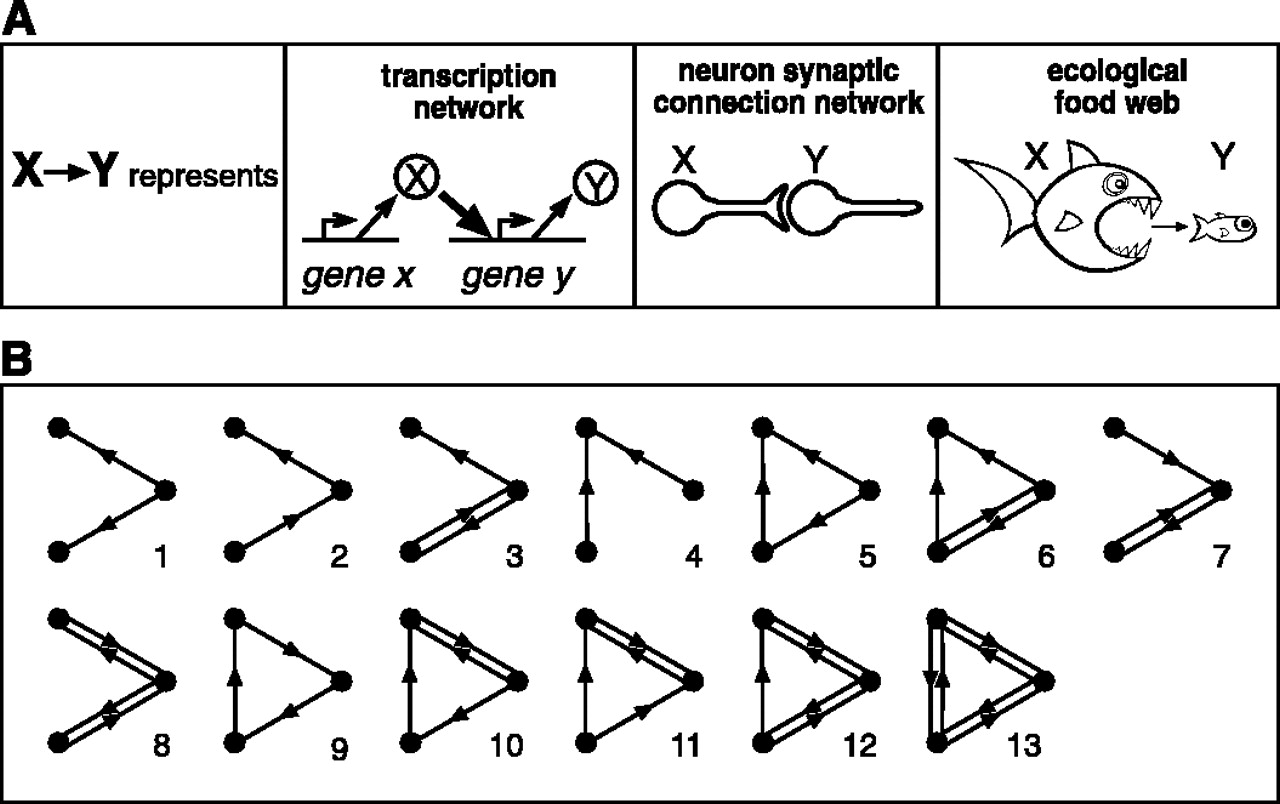
Milo et al. (2002). Network Motifs: Simple Building Blocks of Complex Networks. Science
Motifs in graphs
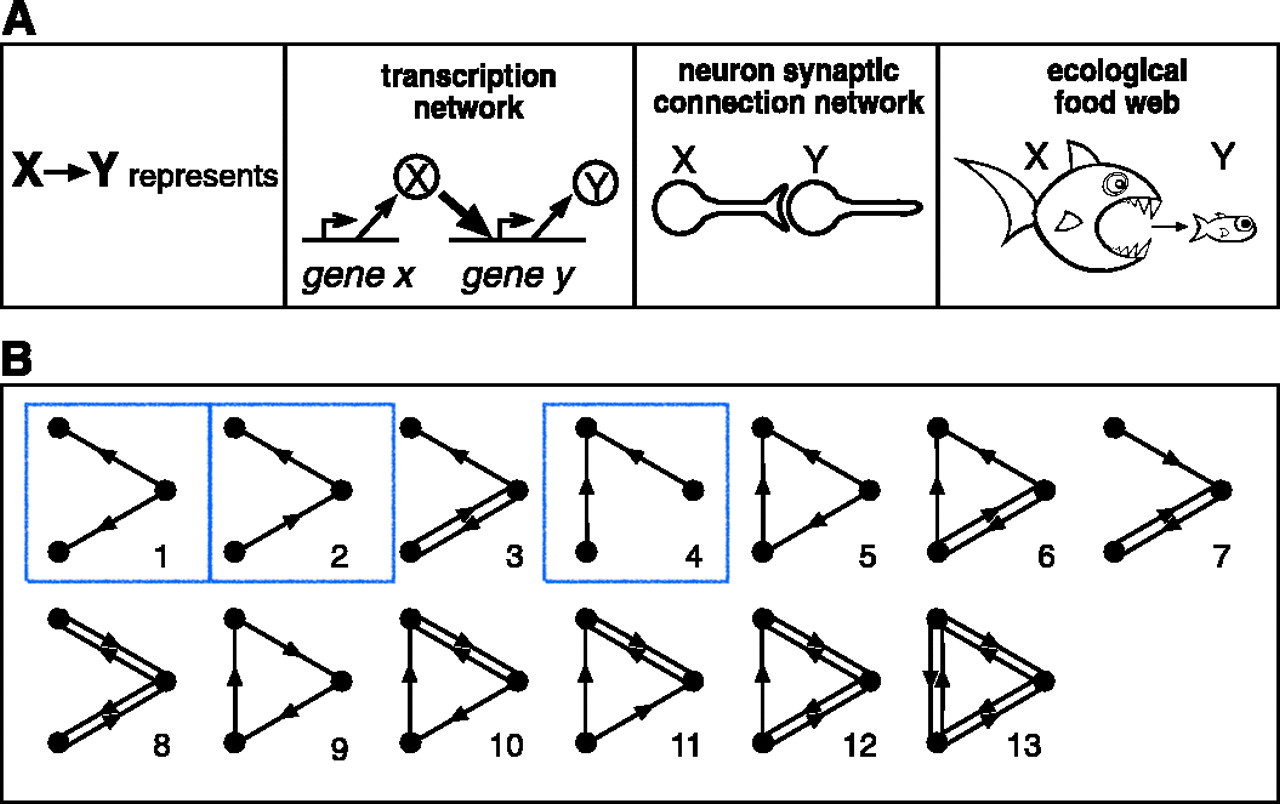
Milo et al. (2002). Network Motifs: Simple Building Blocks of Complex Networks. Science
2-edge motifs in undirected graphs

2-edge motifs in hypergraphs
Claim: What’s special about the structure of hypergraphs is that they have diverse, undirected, two-edge motifs: intersections.

Intersections
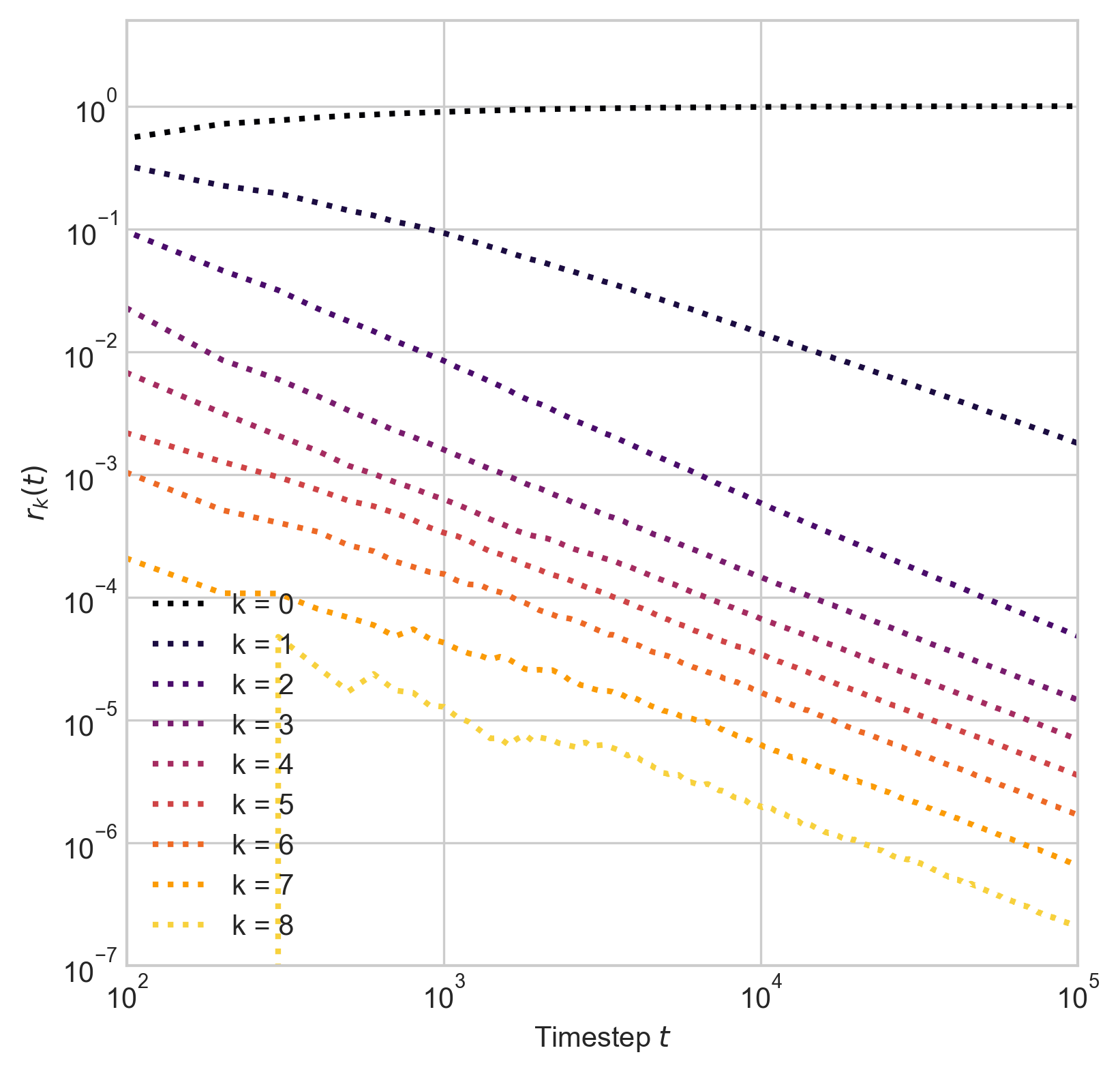
In empirical temporal hypergraphs, the intersection profile \(r_k^{(t)}\) often decays at rates close to \(t^{-1}\) or \(t^{-2}\), regardless of \(k\).
This is interesting because an growing Erdős–Rényi hypergraph would have \(k\)-intersections which decay at rate \(t^{-k}\).
Benson, Abebe, Schaub, and Kleinberg (2018). Simplicial closure and higher-order link prediction. PNAS
Chodrow (2020). Configuration models of random hypergraphs. JCN
Landry, Young, and Eikmeier (2023). The simpliciality of higher-order networks. EPJ Data Sci.
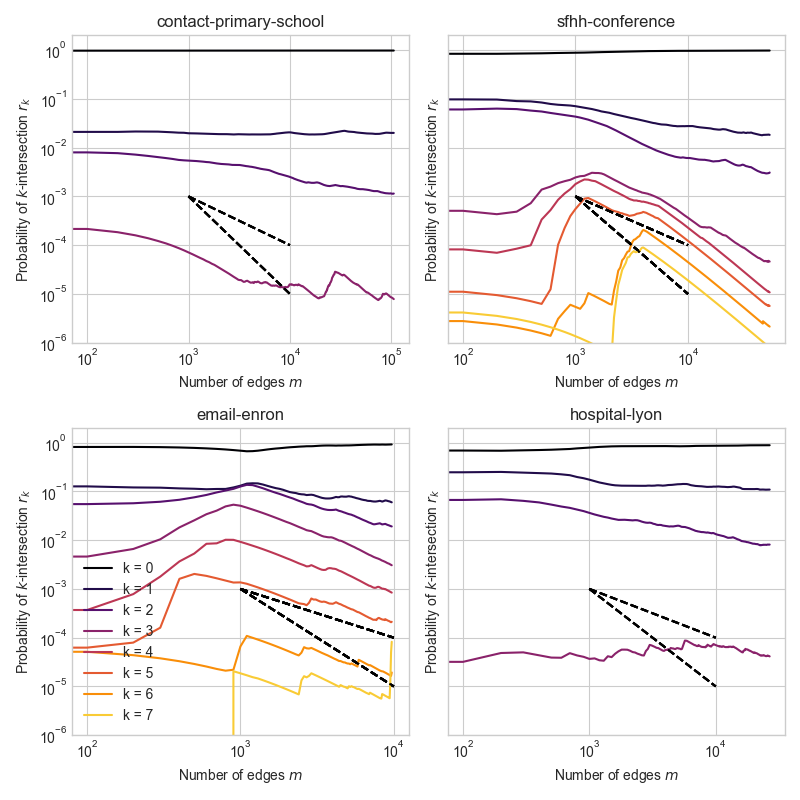
Dashed lines give slope of \(t^{-1}\) and \(t^{-2}\) decay.
Ongoing work with…

Xie He
Mathematics
Dartmouth College

Peter Mucha
Mathematics
Dartmouth College
Mechanistic, interpretable, learnable models of growing hypergraphs.

In each timestep…

Select a random edge

Select random nodes from edge

Add nodes from hypergraph
Add novel nodes

Form edge

Repeat

Repeat

Formally
In each timestep \(t\):
- Start with an empty edge \(f = \emptyset\).
- Select an edge \(e \in H\).
- Accept each node from \(e\) into \(f\) with probability \(\alpha\) (condition on at least one).
- Add \(X\) novel nodes.
- Add \(Y\) nodes from \(H \setminus e\).
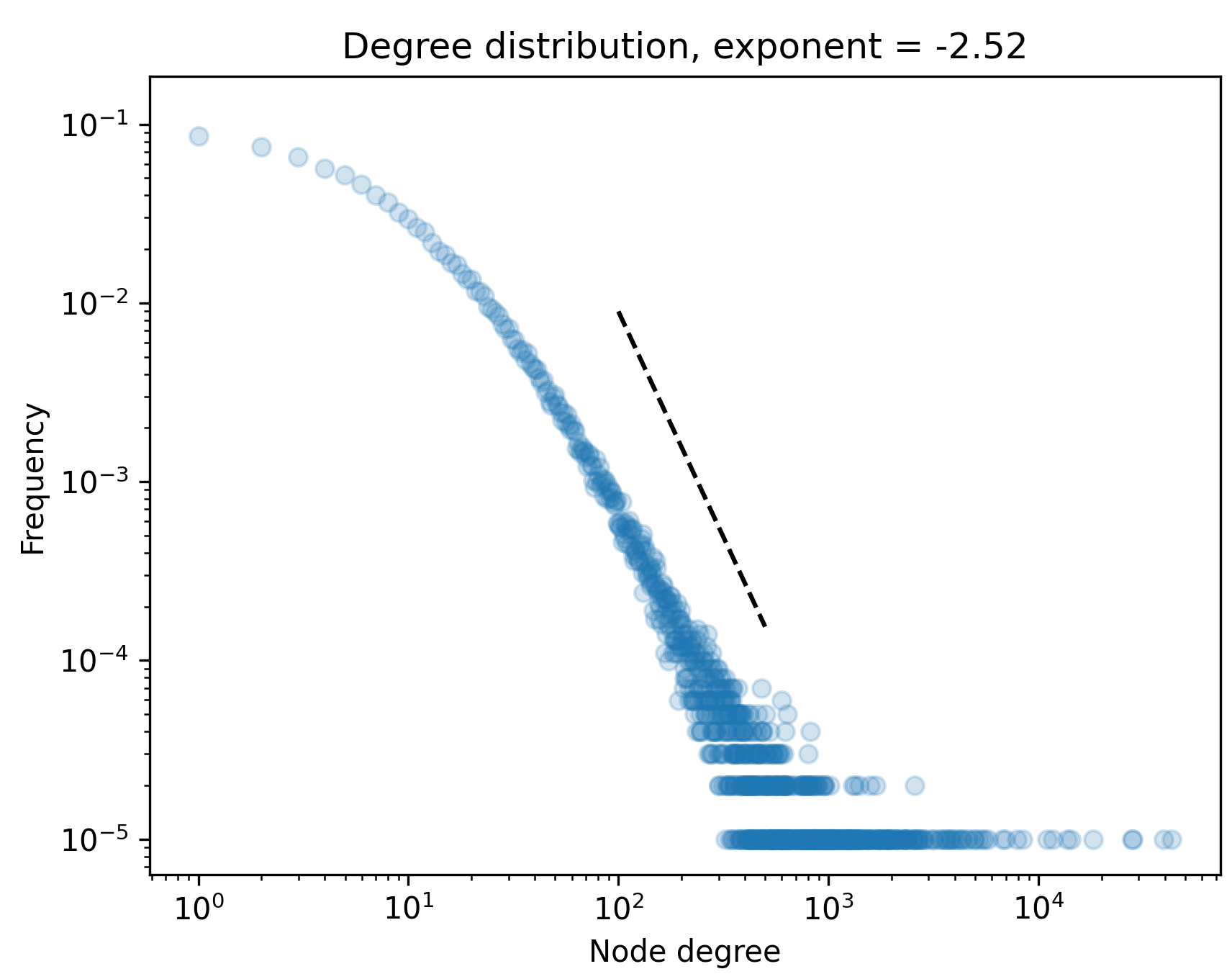
Power-law heavy-tailed degree distribution
Proposition (He, Chodrow, Mucha ’24): As \(t\) grows large, the degrees of \(H_t\) converge in distribution to a power law with exponent
\[
p = 1 + \frac{1-\alpha +\mathbb{E}[X] +\mathbb{E}[Y] }{1-\alpha(1 + \mathbb{E}[X] + \mathbb{E}[Y] )}\;.
\]
Reminders:
- \(\alpha\): retention rate of nodes in sampled edge.
- \(X\): number of novel nodes added to edge.
- \(Y\): number of nodes from \(H\) added to edge.
Some connections to preferential attachment hypergraphs:
Avin, Lotker, Nahum, and Peleg (2019). Random preferential attachment hypergraph. ASONAM
Roh and Goh (2023) Growing hypergraphs with preferential linking. J. Korean Phys. Soc.
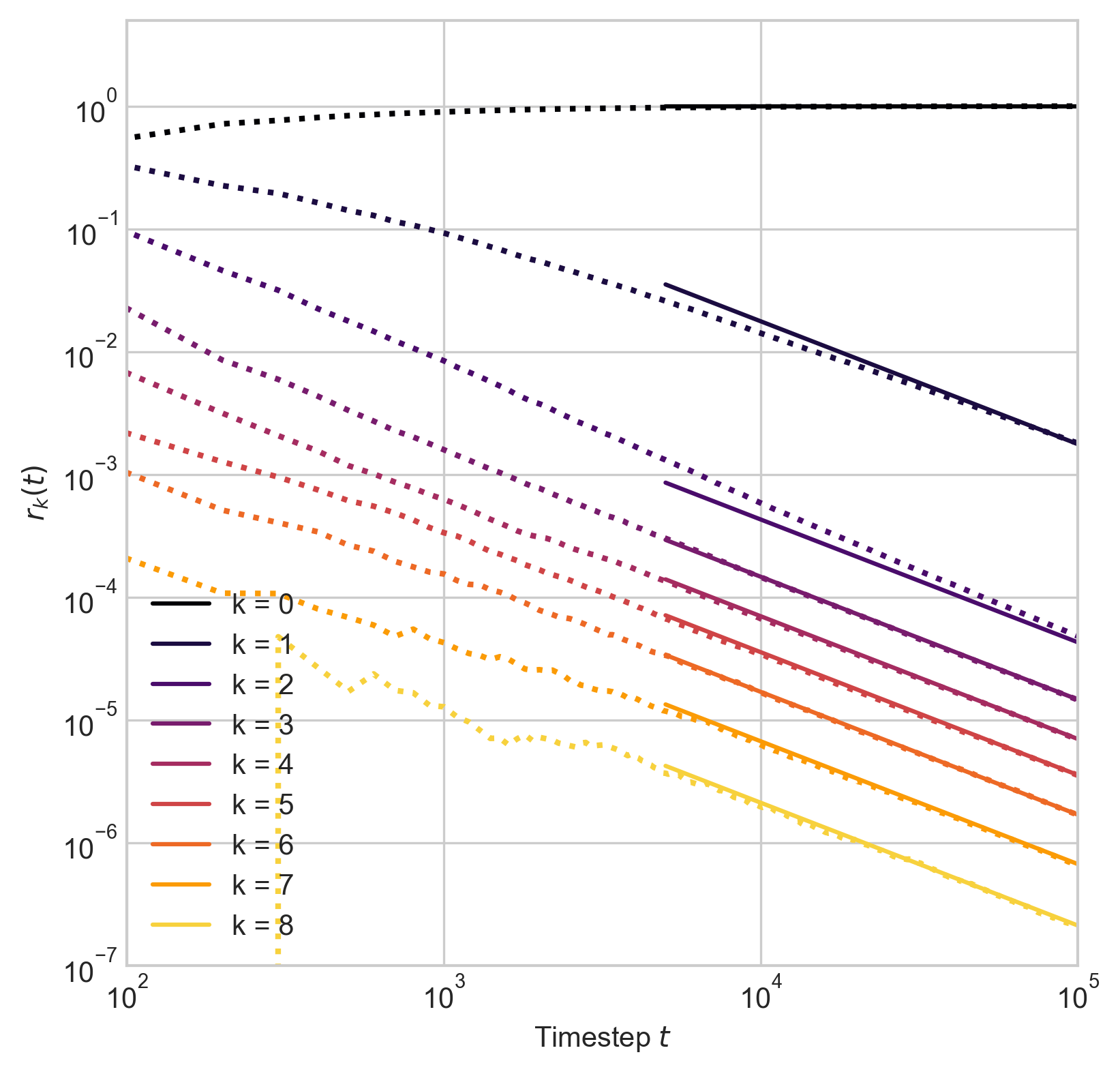
Edge intersections
Proposition: There exist constants \(q_k\) such that, as \(t\rightarrow \infty\),
\[ \begin{aligned} r_{k}(t) \simeq \begin{cases} q_k & \quad \text{if } k \leq k_0\\ t^{-1} q_k &\quad \mathrm{otherwise}\;. \end{cases} \end{aligned} \]
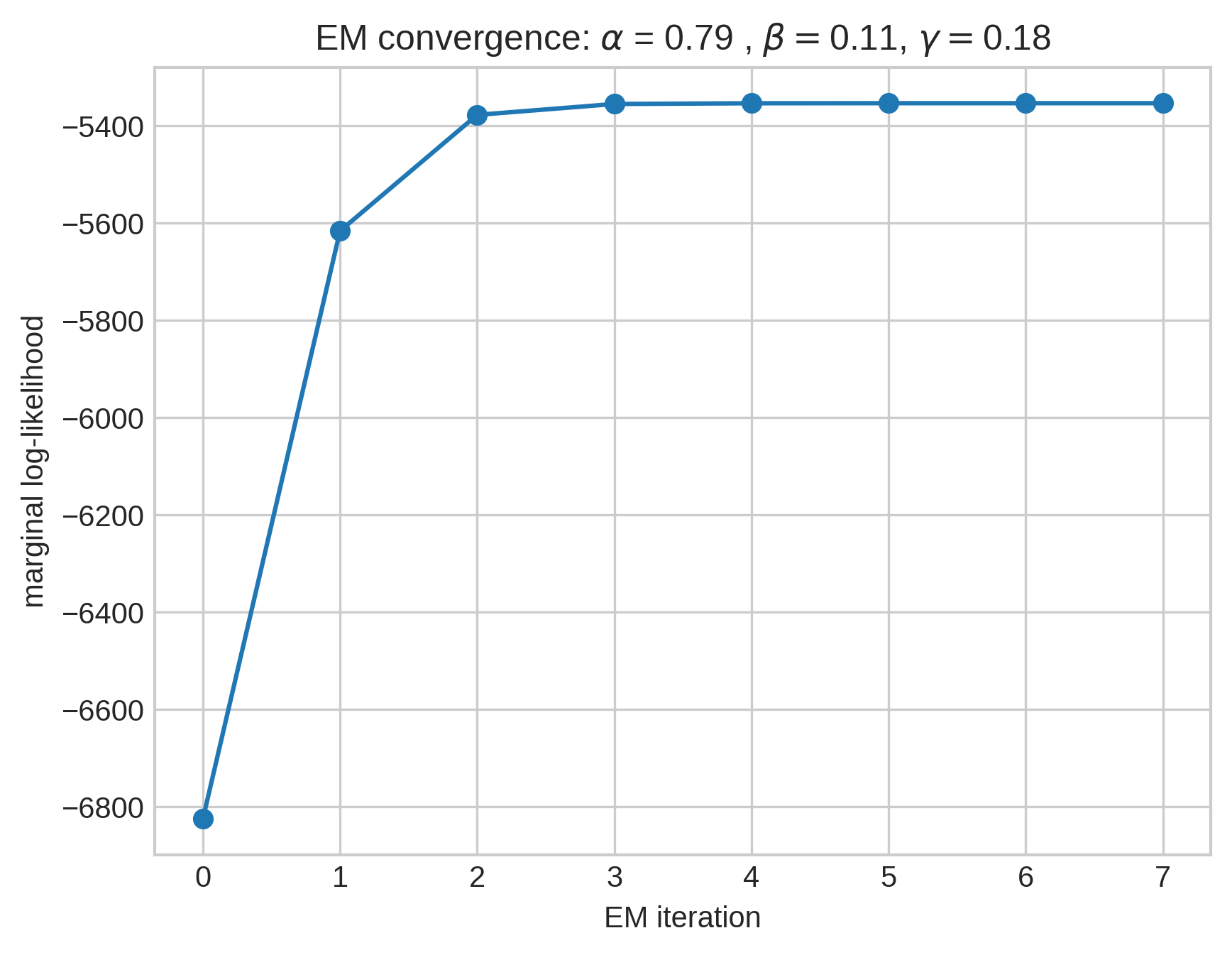
Learning from data
Aim: given the sequence of edges \(\{e_t\}\), estimate:
- \(\alpha\), the edge retention rate.
- \(p_X\), the distribution of the number of novel nodes added to each edge.
- \(p_Y\), distribution of the number of pre-existing nodes added to each edge.
Expectation maximization:
- For each edge \(e_t\), form a belief about which prior edge \(f \in H_{t-1}\) \(e_t\) was sampled from.
- Maximize the expected complete log-likelihood with respect to \(\alpha\), \(p_X\), and \(p_Y\) under this belief.
Summing up
Hypergraphs are locally distinct from graphs in that they have interesting two-edge motifs (intersections).
Learnable, mechanistic models of hypergraph formation allow us to both model this phenomenon and achieve competitive performance on link prediction problems.
arXiv coming soon 😬😬😬
Thanks everyone!
Xie He
Dartmouth College
Peter Mucha
Dartmouth College